
Technical challenges
- To find a technical solution for indoor positioning of the robot that is so robust and easy to handle that it can be used by workers at a construction site.
- A very difficult physical environment with dust, dirt and vibrations.
- High demands for positioning accuracy over a relatively large workspace.
- Safety aspects.
- Difficult cost target.

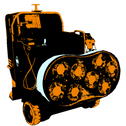
Positioning beacon
The picture to the right shows an example of a beacon. The IR-light is generated by two LED multichips with the light radiating from the beacons in a semicircle. For better robustness and accuracy, as well as lower power consumption when using batteries, the beacons are equipped with radio communication so that they can be controlled from the system's computer. With lower positioning accuracy, the radio can be excluded. The beacons can either be powered with built-in batteries or from an external power supply cable. The system can be equipped with either portable or fixed beacons.
Floor Grinding Robot
One of the leading manufacturers of tools used in the grinding of granite and concrete floors in the world resides in Sweden. By grinding and polishing concrete, it is possible to achieve the same finish as a polished marble floor. Recently, cleanliness has become an increasingly important aspect in the industry thus most floors are epoxy-coated to allow for easy cleaning. The use of epoxy is an occupational health issue and an environmentally dangerous process that has now been replaced by the grinding and polishing of concrete floors. The grinding process is slow however, and must be repeated up to 7 times making the work monotonous and tedious. This applies in particular to large installations such as assembly halls for vehicles, aircraft hangars and shopping malls. To increase contractors' productivity while also reducing monotony in work, Intelligent Machines has developed a system for autonomous floor grinding.

Technology description
Grinding machines are manufactured in many different designs and sizes. We wanted to not only automate the biggest machines but also smallest. Therefore, the cost of such a system was of great importance and was required to be kept low in order to be applicable to all products. In order to achieve high grinding quality, the positioning accuracy of the grinder was required to be better than a few centimeters over the whole grinding area. Achieving these requirements required Intelligent Machines to develop a completely new technology for indoor positioning. The technology is based on an omnidirectional camera that is placed on top of the grinding machine and active landmarks or beacons that are temporarily set up at the construction site. The beacons consist of infrared emitters mounted on stands. The mounted camera only detects a specific wavelength of light resulting in easy filtering and reading of the information from the beacons by the camera - even with the interfering light from other sources in the environment. The system uses Simultaneous Localisation and Mapping (SLAM) to automatically determine the beacons’ positions without the need for any manual measurements or calibration to be performed during the actual placing of beacons. The system Intelligent Machines has developed includes all necessary software and hardware to convert a standard floor grinder to an autonomous one. The system is also suitable for other applications where there is a need for positioning with a cm-level accuracy in open spaces (eg. example automatic floor care and automated logistics).
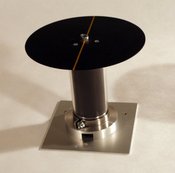
Positioning Sensor
The picture in the right shows the positioning sensor mounted on the grinding machine. The sensor consists of an infrared sensitive camera and a spherical mirror. The spherical mirror allows the camera to see a 360°-image of the room. The camera is connected to a computer which continuously calculates the grinding machine's position based on the angle to the beacons retrieved from the camera image. The software also contains functions for trajectory planning and tracking performance.
Fact box
- IM has made an initial technical feasibility study
- IM has developed a completely new technology for positioning indoors
- IM has built an experimental model and carried out experiments in full scale to verify the technology solution
- IM has developed a set of requirements and overall system solution